Telepräsenzroboter
Alexander Kögel, Dr. Thomas Löffler und Francisco Hernandez
In diesem Nachgelesen erfahren Sie:
- Was sind Telepräsenzroboter?
- Welche Potentiale bieten sie für die Telearbeit im industriellen Kontext?
- Was sind Voraussetzungen für den Einsatz von Telepräsenzrobotern und wo liegen ihre Grenzen?
Telearbeit und Präsenzempfinden
Der Anteil der telearbeitenden Personen ist im Zuge der Covid-19-Pandemie im Dezember 2021 auf 27,9 Prozent der Beschäftigten angestiegen.1 Auch ohne Pandemie sprechen viele Gründe für Telearbeit: So stieg zwischen 2009 und 2018 die Zahl der Geschäftsreisen in deutschen Unternehmen um 24 Prozent; die meisten Reisen (60 Prozent) dauerten nur einen Tag2, waren also offenbar nur mit einer kurzen Aktivität am Zielort verbunden. Pro Reise wurden im Mittel über 300 € zzgl. (!) der Personalkosten aufgewendet.3 Geschäftsreisen und Arbeitswege erhöhen das Verkehrsaufkommen, und damit den weltweiten Energieverbrauch und setzen CO2-Emissionen frei. Die Reise- und Wegezeiten strapazieren die Vereinbarkeit von Beruf und Privatem, einem wichtigen Faktor bei der Gewinnung und Bindung von Fachkräften, vor allem aus jüngeren Generationen.
Herausforderungen
Herausfordernd wird Telearbeit besonders dann, wenn nicht allein Daten, Dokumente und anderes „Digitales“ aus der Ferne zu bearbeiten sind, sondern eine Interaktion zwischen Personen nötig wird. Videokonferenzen verbessern dabei – im Vergleich zu Telefonaten – bereits die Verständigung: Durch das bewegte Bild und die so sichtbare Gestik und Mimik können Emotionen des Gegenübers wahrgenommen und auch non-verbal Rückmeldungen geben werden.
Jedoch fehlen bei Videokonferenzen per PC, Notebook, Smartphone oder auch per Mixed-Reality-Brillen wichtige Elemente einer natürlichen Kommunikation: Vor allem können die Teilnehmenden ihre Position und ihr Sichtfeld nicht verändern, sondern sind von der Lage der Kamera des Gesprächspartners abhängig. Deshalb werden die räumliche Wahrnehmung und das Autonomieempfinden – die Fähigkeit sich selbstbestimmt zu bewegen und umzuschauen – beeinträchtigt. Das mag bei Treffen, die aus Reden, Präsentationen und Diskussionen bestehen, hinnehmbar sein. Aber immer dann, wenn vor Ort etwas beobachtet, erkundet, gezeigt oder ausprobiert werden muss, ist ein höheres Maß von Telepräsenz4 nötig: Die aus der Ferne agierenden Telearbeitenden müssen sich in der Situation als „anwesend“, „dabei“ und „gegenwärtig“ empfinden.
Was sind Telepräsenzroboter?
Telepräsenzroboter (TPR) sind eine Möglichkeit, eine stärkere Telepräsenz herzustellen. TPR sind fahrbare, über Fernzugriff steuerbare Videokonferenzsysteme. Sie bestehen aus
- Komponenten zur Audio- sowie Video-Ein- und Ausgabe (Bildschirm, Kameras, Mikrofone, Lautsprecher),
- Telekommunikationskomponenten (WLAN, Mobilfunk),
- einer fahrbaren Plattform ggf. in Verbindung mit einem Balanciersystem,
- ggf. einer Höhenverstellung,
- Sensoren zur Umfeld-Erkennung sowie
- Steuerungskomponenten.
Charakteristische Merkmale
Heute marktverfügbare Telepräsenzroboter erscheinen als „Tablet auf selbstbalancierenden Personal Transporter“ (Abbildung 1).
Charakteristisch für die Nutzung von Telepräsenzroboter ist, dass sich Telearbeitende, die sich an einem Ort 1 befinden, mittels Fernsteuerung – in der Regel über das Internet – autonom in der Umgebung, in der sich der Roboter befindet – dem Ort 2 –, bewegen und dort mit Präsenzarbeitenden interagieren können (Abbildung 2). Neben der Interaktion über Ton und Bewegtbild sind das Bewegen des TPR, eine Änderung des Sichtfeldes (Drehen/Schwenken, Zoom) und bei einigen Modellen auch eine Höhenänderung der Einheit Bildschirm/Kamera (zwischen Sitz- und Stehhöhe) möglich.

Abbildung 1: TPR der Firma Double Robotics im Mittelstand-Digital Zentrum Chemnitz
Die Bedienung marktverfügbarer Telepräsenzroboter ist sehr intuitiv; für die Einweisung in die Nutzung genügen oft wenige Minuten; die Steuerung erfolgt über einen Internet-Browser; lokal muss keine Software implementiert werden.5
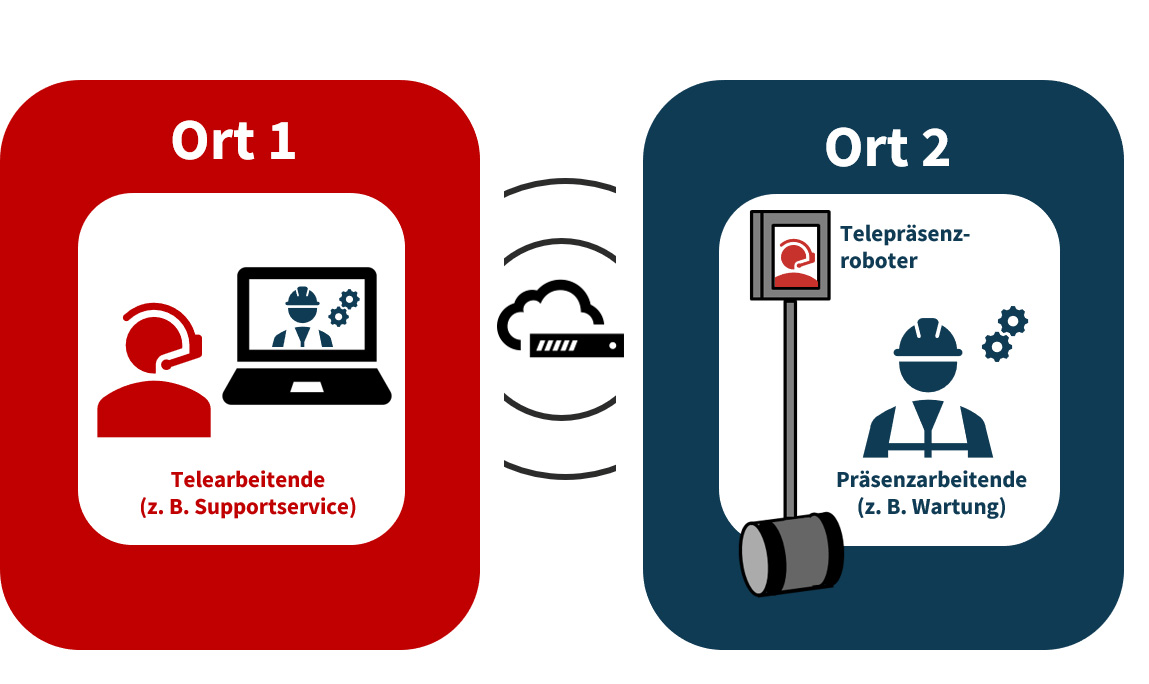
Abbildung 2: Anwendungsprinzip des TPR
Auch die Präsenzarbeitenden profitieren vom TPR-Einsatz, denn sie müssen für die Kommunikation kein Smartphone, Tablet, Notebook und auch keine Mixed-Reality-Brille mehr halten, tragen und positionieren. Somit können sie freihändig und „unbeschwert“ arbeiten.
Bisher wurden Telepräsenzroboter vor allem in den Bereichen Büro, Gesundheitswesen, Pflege sowie Lehre und Forschung eingesetzt. Beispiele sind virtuelle Konferenzen und Besprechungen6,7, virtuelle Visiten bei aus Infektionsschutzgründen isolierten Patient*innen bzw. Bewohner*innen in entfernten Altersheimen8,9,10, der virtuelle Austausch zwischen Lehrenden und Lernenden11 und die virtuelle Mobilität von Menschen mit Behinderungen12.
Einsatzmöglichkeiten für Telepräsenzroboter in der Industrie
Im Industriellen Kontext sind erste Anwendungstest aus dem Jahr 2015 bekannt13. Laut einer Erhebung unter Expert*innen aus der Industrie ist der Einsatz von TPR in folgenden Anwendungsfällen erfolgversprechend14,5:
- Unterstützung bei der Instandhaltung,
- Durchführung von und/oder Teilnahme an Aus- und Weiterbildung bzw. Unterweisungen,
- Durchführung von und/oder Teilnahmen an Audits,
- Anforderungsermittlung und Reviews im Rahmen der Produktentwicklung,
- Unterstützung von Inbetriebnahmen.
Voraussetzungen
Um TPR im eigenen Unternehmen, bei Kunden, Lieferanten oder Partnern einsetzen zu können, sind vor allem folgende Voraussetzungen zu erfüllen:
- Der TPR muss zum Einsatzort gelangen (z. B. Versand, Mitnahme durch andere Geschäftsreisende) oder dort verfügbar sein.
- Am Einsatzort ist ein Standort für die Ladestation mit 230-V-Anschluss nötig.
- Am Einsatzort muss eine WLAN-Verbindung (ggf. auch über mobilen Hotspot) mit mindestens 2 Mbit/s Bandbreite vorhanden sein.
- Für den Datentransfer sind 300 – 1000 MB/h von Roboter zum Telearbeitenden und 200 – 600 MB/h vom Telearbeitenden zum Roboter zu kalkulieren.
- Eine verantwortliche Person muss den TPR und dessen Ladestation auspacken, aufstellen, aufladen, die Verbindung und Reichweite des WLAN überprüfen.
- Ein TPR-Administrator muss für den Telearbeitenden eine Berechtigung zur TPR-Steuerung erstellen.
- Da die Möglichkeit besteht, dass der Telearbeitende mit dem TPR Fotos oder Videos aufnimmt, muss dies am Einsatzort zulässig sein. Alternativ kann der Administrator des TPR die Aufnahmefunktion deaktivieren.
Hürden
Der Einsatz heute marktverfügbarer TPR stößt aktuell noch auf folgende Grenzen:
- Die meisten TPR können nur in Innenräumen eingesetzt werden.
- Der Boden sollte eben und wenig reflektierend sein. Schwellen bis ca. 3 cm können überfahren werden.
- TPR können (noch) nicht mit der Gebäudetechnik kommunizieren. Daher können über TPR z. B. keine Automatiktüren geöffnet oder Aufzüge gerufen werden.
- Die Akkulaufzeiten bewegen sich zwischen ca. 75 Minuten bei regelmäßiger Bewegung und knapp 2 Stunden beim passiven Verharren in einer Position.
Neben der großindustriellen Nutzung finden Telepräsenzroboter auch bereits erfolgreich in kleinen und mittleren Unternehmen Verwendung. Im nachfolgenden Beispiel skizzieren wir, wie der konkrete Einsatz eines TPR im Alltag eines Unternehmens aussehen könnte.
Fallbeispiel
Der sächsische Sondermaschinenbauer MovyStar liefert ein kundenspezifisches Material-Transportsystem an einen schwäbischen Automobilzulieferer. Zur Inbetriebnahme sind bereits die zwei Techniker Herr Strom und Herr Blechschmidt für einige Tage beim Kunden im Einsatz, um das Transportsystem elektrisch anzuschließen sowie steuerungstechnisch und mechanisch in die Produktionsanlage des Kunden zu integrieren. Bei früheren Projekten wäre die Geschäftsführerin von MovyStar, Frau Bleibtreu, die wichtige Kunden immer persönlich betreut, für einen Tag und zwei Übernachtungen in den Stuttgarter Raum gefahren, um bei der Abnahme vor Ort dabei zu sein. Diesmal spart sie sich einen Teil des Aufwands: Ihre Inbetriebnahme-Techniker haben einen TPR mit zum Kunden genommen.
Internetverbindung herstellen
Am Tag der Abnahme bringen sie den TPR mit voll aufgeladener Batterie vor dem Transportsystem in Position, schalten ihn ein und stellen eine Internetverbindung her. Herr Lahn, der IT-Leiter von MovyStar, hat festgestellt, dass die Internetverbindung bei dem Kunden vor Ort sehr instabil ist und hat sich deswegen für den Einsatz eines mobilen 5G Hotspots entschieden. Der mobile Hotspot wird während Frau Bleibtreus Besuch mittels TPR eine stabile Verbindung sicherstellen. Und Frau Bleibtreu kann sicher sein: auch über diese Verbindung kommuniziert der TPR mit der ihn steuernden Person vollständig Ende-zu-Ende-verschlüsselt. Die übertragenen Bilder und Töne sind somit vor dem Zugriff Fremder sicher.
Bewegungsradius schaffen
Die Techniker vor Ort haben auch mit Sicherheitsband die für den TPR befahrbaren Zonen markiert. So weiß Frau Bleibtreu genau, wo sie sich mit dem TPR frei bewegen kann. Und sollten sich doch Personen oder Objekte im Bewegungsradius des TPR aufhalten: der TPR erkennt diese selbständig und kann Hindernisse auch autonom umfahren. Frau Bleibtreu schaltet sich 10:00 Uhr, zum Start der Abnahme, online zu dem Treffen in der Werkhalle des Kunden dazu. Als der Kunde einen vermeintlichen Mangel beim Bedienkomfort der Anlage anspricht, kann Frau Bleibtreu mit dem TPR selbständig zur Rückseite der Anlage fahren, um zu zeigen und zu erläutern, wie MovyStar eine sehr restriktive Sicherheitsanforderung aus dem Lastenheft des Kunden notwendigerweise umgesetzt hat; in deren Folge ist eine andere Bedienung nicht zulässig. Der Kunde akzeptiert die Erläuterung und das Abnahmeprotokoll wird im Einvernehmen ausgefertigt.
Kundenbeziehung stärken
Um 12:00 Uhr ist die Abnahme beendet. Auf das gemeinsame Mittagessen mit dem Kunden muss Frau Bleibtreu zwar verzichten. Aber sie hat viel Zeit gewonnen. Der Kunde ist sehr zufrieden, da die Geschäftsführerin während des gesamten Prozesses vor Ort war. Für Frau Bleibtreu war der direkte Kontakt mit dem Kunden sehr wichtig, um so die Kundenbeziehung zu stärken. Herr Strom und Herr Blechschmidt bringen den TPR im Kofferraum ihrer Dienst-PkW wieder sicher zurück. Denn in der kommenden Woche wird der TPR im Versuchsfeld von MovyStar gebraucht. Dort wird ein neuer Prototyp aufgebaut. Die Werkstudentin, Frau Neufeldt, die diesen Versuchsträger wesentlich mitentwickelt hat, muss nach einer OP aus dem Homeoffice arbeiten und kann mit Hilfe des TPR den Prototypenaufbau begleiten.
Das Beispiel verdeutlicht die unterschiedlichen Nutzungsmöglichkeiten eines TPR im Unternehmen und wie verschiedene Unternehmensfelder bzw. Abteilungen davon profitieren können.
Wirtschaftlichkeit von Telepräsenzrobotern
TPR können aktuell zu einem mittleren vierstelligen Eurobetrag erworben werden. Wenn durch den TPR-Einsatz Fernreisen und/oder Reisezeiten von hoch dotiertem Personal eingespart werden, ist daher mit einer schnellen Amortisation zu rechnen. Erfolgsentscheidend ist die einfache Implementierung der TPR und das schnelle Erlernen der Steuerungsfunktionen durch den Telearbeitenden. Im Mittelstand-Digital Zentrum Chemnitz bieten wir Ihnen Erprobungsmöglichkeiten von Telepräsenzrobotern und ihrer Technologie. Kontaktieren Sie uns gern unverbindlich per E-Mail an info@digitalzentrum-chemnitz.de.
Quellen und weiterführende Literatur
- ifo Institut 2022 – https://www.ifo.de/node/67217
- Statista. Dauer der Geschäftsreisen deutscher Unternehmen in den Jahren 2004 bis 2018, https://de.statista.com/statistik/daten/studie/72120/umfrage/dauer-der-geschaeftsreisen-deutscher-unternehmen/#professional, zuletzt geprüft am 18.3.2022
- Verband Deutsches Reisemanagement (2019). VDR-Geschäftsreiseanalyse 2019. Verband Deutsches Reisemanagement e.V. S. 10.
- Minsky, M. (1980). Telepresence. OMNI Magazine. web.media.mit.edu/~minsky/papers/Telepresence.html
- Hernandez, F., Löffler, Th., Schleicher, T., Bullinger, A.C. (2021). Eignung eines Telepräsenz-Roboters für die Remote-Instandhaltung. In: Biedermann, H. (Hg.) Instandhaltung als Erfolgsfaktor. 35. Internationaler ÖVIA-Kongress, 29. bis 30. September 2021, Leoben. Angenommen.
- Björnfot, P., Bergqvist, J., & Kaptelinin, V. (2018). Non-technical users’ first encounters with a robotic telepresence technology: An empirical study of office workers. In: Paladyn, Journal of Behavioral Robotics 9 (1), S. 307–322. DOI: 10.1515/pjbr-2018-0022.
- Lee, M. K., & Takayama, L. (2011). „Now, i have a body“. In: Desney Tan, Geraldine Fitzpatrick, Carl Gutwin, Bo Begole und Wendy A. Kellogg (Hg.): Proceedings of the 2011 annual conference on Human factors in computing systems – CHI ‚11. the 2011 annual conference. Vancouver, BC, Canada, 07.05.2011 – 12.05.2011. New York, New York, USA: ACM Press, S. 33.
- Lee, WH., Park, J., & Park., C. H. (2018). Acceptability of Tele-assistive Robotic Nurse for Human-Robot Collaboration in Medical Environment. In: Kanda, Ŝabanović et al. (Hg.) 2018 – Companion of the 2018 ACM/IEEE, S. 171–172.
- Valérie, J. (2019). Einsatz von Telepräsenzrobotern für ärztliche Konsultationen. Online verfügbar unter https://irf.fhnw.ch/bitstream/handle/11654/30275/Jungo%20Val%C3%A9rie.pdf?sequence=1, zuletzt geprüft am 9.3.2022.
- Kehl, C. (2018). Robotik und assistive Neurotechnologien in der Pflege – gesellschaftliche Herausforderungen. Vertiefung des Projekts »Mensch-Maschine-Entgrenzung«. Büro für Technikfolgen-Abschätzung beim Deutschen Bundestag (TAB). Online verfügbar unter https://www.tab-beim-bundestag.de/de/pdf/publikationen/berichte/TAB-Arbeitsbericht-ab177.pdf, zuletzt geprüft am 22.07.2020.
- Puarungroj, W., Boonsirisumpun, N. (2020). Multiple Device Controlled Design for Implementing Telepresence Robot in Schools. In: Simon K. S. Cheung, Richard Li, Kongkiti Phusavat, Naraphorn Paoprasert und Lam‑For Kwok (Hg.): Blended Learning. Education in a Smart Learning Environment. Cham: Springer International Publishing (12218), S. 405–415.
- Herring, S. (2013). Telepresence robots for academics. DOI: 10.1002/meet.14505001156.
- Double Robotics (2015). Case Study: General Electric Advanced Manufacturing Works + Double Robotics. Online verfügbar unter https://youtu.be/qdm4hLM7_fo, zuletzt geprüft am 27.07.2020.
- Hernandez F., Waechter M., Bullinger A.C. (2021) A First Approach for Implementing a Telepresence Robot in an Industrial Environment. In: Nunes I.L. (eds) Advances in Human Factors and System Interactions. AHFE 2021. Lecture Notes in Networks and Systems, vol 265. Springer, Cham. https://doi.org/10.1007/978-3-030-79816-1_1